

Hello 👋! Welcome to this blog series on Data Structures and Algorithms, where we'll embark together on uncovering and understanding a wide range of data structures and algorithms available to solve problems.
In this post, we'll try to understand how Binary Search can be used to solve problems when the given input array is unsorted.
Prerequisites
Read and understand code
Basic understanding of Binary Search (fret not! There will be a recap of this too!)
This article is quite long and detailed. But I assure you that if you stick with me until the end, you will get a basic idea of when and how to apply binary search when the given input is not explicitly sorted.
Introduction
If you are here after reading the words Binary Search and Unsorted together and were fascinated, sorry to disappoint you, but it is not possible to use binary search on unsorted arrays/ lists! You've been click-baited!
What is possible is to try and come up with a sorted search space using the given constraints and input of a problem and try applying binary search if certain conditions are met.
How to come up with a sorted search space, and what are the conditions that allow you to use the binary search algorithm? You'll have to stick further to know that.
A Brief on Binary Search
Binary Search is a powerful algorithm which is primarily used for searching a target value in a sorted list.
To recap the idea, we maintain two pointers:
lowandhighinitially withlow = 0(assuming 0-based index) andhigh = n-1, wheren is the number of elements in the list.At every step, we find the middle element
midbetween thelowandhighpointers and compare the target with the value inmid.Depending on the comparison, we eliminate one-half of the search space.
We repeat this comparison until the
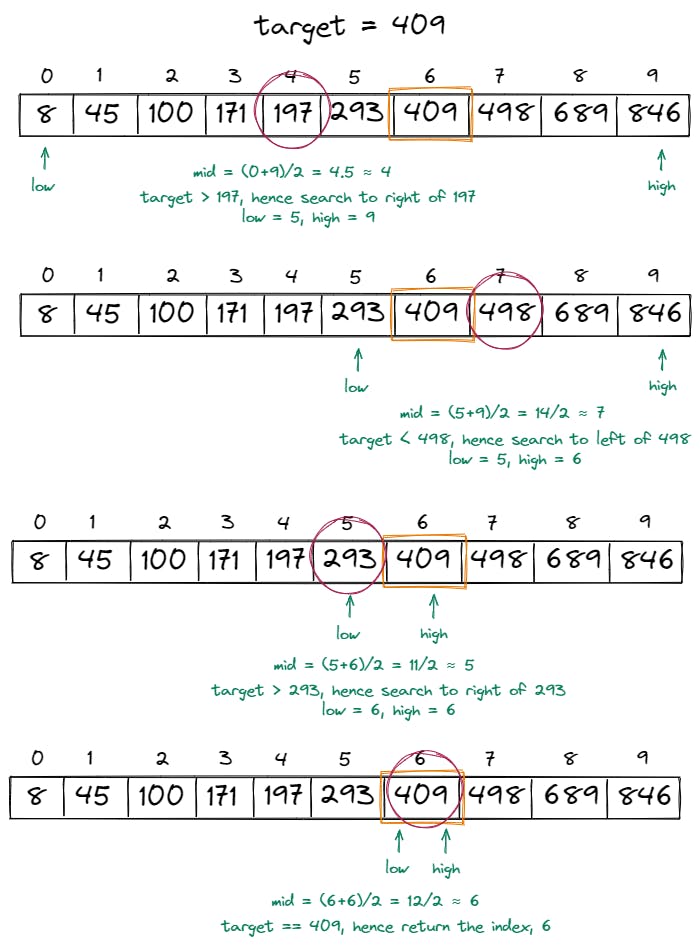
lowpointer is less than or equal to thehighpointer. If and whenlow > high, it means that the target was not present in the list.The image below shows a sample implementation of the binary search algorithm:
Below is the code for the algorithm:
int binarySearch(int[] array, int target) { int n = array.length; int low = 0, high = n-1; while(low <= high) { int mid = low + (high - low)/2; if(array[mid] == target) return mid; if(array[mid] > target) { high = mid - 1; } else { low = mid + 1; } } return }The most vital part of the binary search implementation is eliminating the search space by one-half at every step.
This elimination makes the algorithm fast and efficient. The rate of growth is slow for this algorithm. Even for large numbers, the process is quick.
- Time complexity:
O(log n), wheren = the number of elements in the array.
- Time complexity:
Let's say we had a dictionary with 1 million numbers and had to search for a word. In the worst case, we would only be making roughly 20 comparisons.
Imagine using linear search -- we would have to make 1 million words in the worst case!!
Now that we've revised about binary, let's see how we can use the above binary search code and use it when our input is not explicitly sorted.
Predicate Functions
Before we get into how to use binary search when input is unsorted, let us review the example we saw in the previous section.
- The input array was:
[8, 45, 100, 171, 197, 293, 409, 498, 689, 846].
- The input array was:
When the middle element was at the index
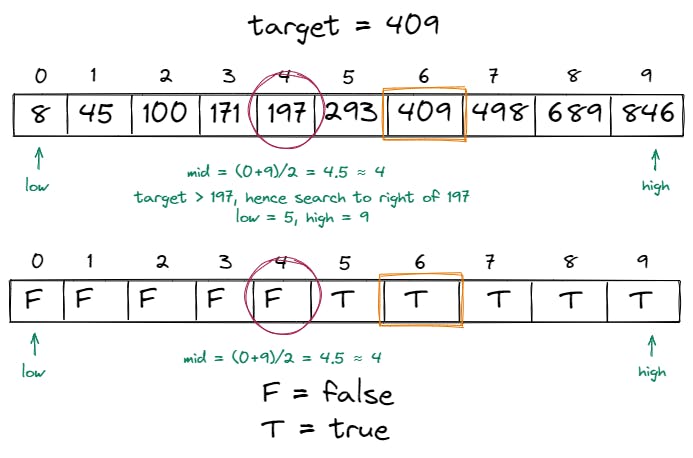
4during the first iteration, after comparison with the target409, we saw that197 > 409.So at this step, we can visualize the above array after comparison as follows:
Since the element in the middle is not equal to
409and the list is sorted, it is guaranteed that the same comparison ofarray[mid] == targetis always going to evaluate to false for every element beforemid.Also, since
197is not greater than409and the list is sorted, it is guaranteed that every element to the left of197is also not going to be greater than409.
This comparison used in the binary search algorithm is a predicate.
Predicate is a function which results in either a true or false value (binary values).
The comparison in the binary search- the middle element with the target results in either true or false.
An example of a predicate function can be
p(x) = x > 10. Any number less than or equal to 10 results in a false. But for every number from and after 11, the predicate will return true.
Further, the comparison we use for binary search is a monotonic predicate function.
In binary search, we have a function
p(x)to evaluate if the value in the middle is greater or less than the target. Ifp(x) = truefor somex, then given the sorted property of the search space, it is a guarantee thatp(y)should also be true for everyy > x. Vice versa is also true.To put it simply, once the predicate for a value gives true, then the predicate for every value after it results in true as well.
If any value evaluates to false, every value after it also results in false.
A monotonic predicate should always give results in the form
T*F*orF*T*.Hence, we can apply binary search to any such search space that results in a series of monotonic true or false when a predicate is applied.
Formally,
Binary search applies to any search space with a defined ordering, if there is a predicate such that p(x) implies p(y) for all y > x.
Example #1
Let's try to understand this concept of the predicate with a problem from Leetcode: First Bad Version. (Note that this problem involves input which is sorted. We will deal with unsorted inputs later).
We are given a sorted search space consisting of versions of a product numbered
[1...n]and we have to find the first bad version of the software.Any version developed after a bad version also leads to a buggy, bad product.
The
isBadVersion(version)API is given to us.
Let's see how to solve this problem. The ordering has already been given to us - the sorted list of products from
[1...n].As usual, we begin with the start and end pointers. Initially
start = 1andend = n.Until the pointers
startandendrefer to the same bad version of the product, we will continue iterating and reducing our search space.The next question is how do we reduce the search space?
Because, unlike the usual binary search algorithm, we do not have a target to compare every element with.
Hence, we'll have to find a predicate that will give us a monotonic result of
T*F*orF*T*which will allow us to reduce the search space.
If you notice this line:
each version is developed based on the previous version, all the versions after a bad version are also bad, you can see that here lies the idea for forming a predicate.The API that's given to us is
bool isBadVersion(version)and we have to keep reducing the search space using this.The way we can do this is as follows:
If a version is bad, then we know that every other version after that is bad. This could potentially also be the first bad version.
If a version is good, then we know that every version before that was also good. We can ignore this version since we don't care about "good" versions.
In terms of pointers
low,high, andmidwheremid = low + (high - low)/2if:isBadVersion(mid) == trueall versions[mid+1...n]are going to be bad. Since this version could also be potentially the first bad, we will need to consider this as the endpoint for the next iteration. Hence updatehigh = mid.isBadVersion(mid) == falseall versions[1...mid]are going to be good. We don't care much about the good version so we can ignore the current versionmid. Solow = mid + 1.
After all the iterations,
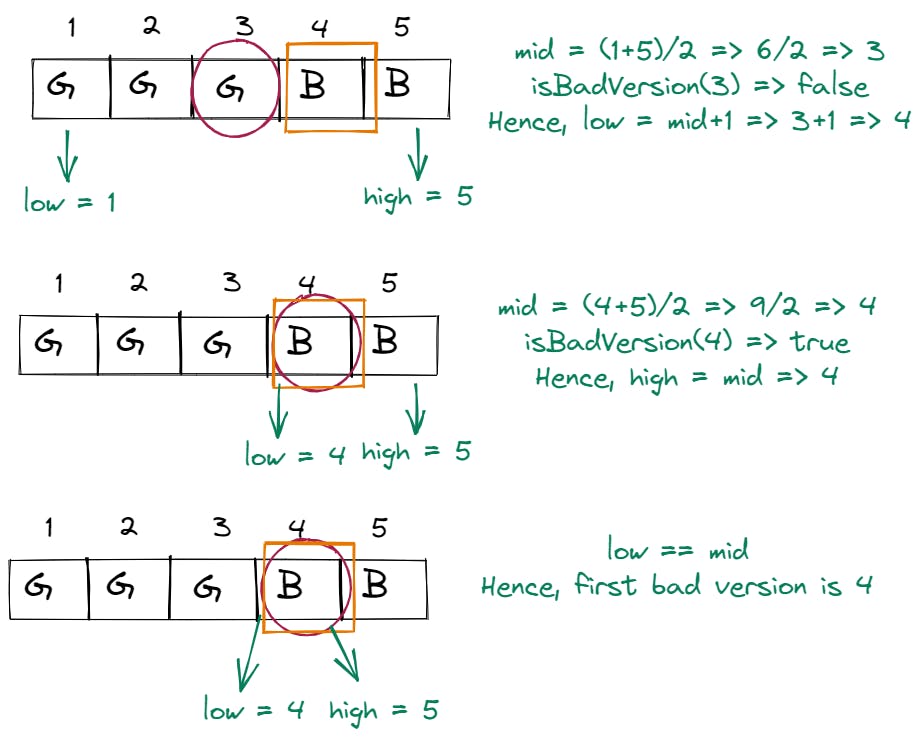
low == high, such that it will be the first bad version.Let's use the sample test case:
n = 5 and bad = 4(of course, this bad version is what we'll have to find and it won't be given to us as arg in the function). We will iterate to find the bad version untillow != high.low = 1,high=5, andmid = 3.isBadVersion(3)givestrue. Now, we know that every version before 3 was also good. Hence, we can ignore the previous and current versions and shiftlow = mid+1 => 3+1 => 4.low = 4,high = 5andmid = 4.isBadVersion(4)givestrue. As this version isfalse, every version after it will also be false. Moreover, this could potentially be the first bad version. Hence, we'll assume this to be the end of the next iteration.high = mid => 4.low = 4,high = 4. Sincelow == high, the iteration ends here and we have found our first bad version.
The predicate in this problem is:
if
isBadVersion(mid)high = mid
else
low = mid + 1
Below is a pictorial representation of the steps we've taken:
Below is the code for the above problem:
/* The isBadVersion API is defined in the parent class VersionControl. boolean isBadVersion(int version); */ public class Solution extends VersionControl { public int firstBadVersion(int n) { int low = 1, high = n; while(low < high) { // to avoid integer overflow int mid = low + (high - low)/2; if(isBadVersion(mid)) { high = mid; } else { low = mid + 1; } } return low; } }Time Complexity: O(log n) Space Complexity: O(1)
Example #2
The previous question dealt with finding the first truth: truth here refers to the bad version.
Let's instead find the first bad version by finding the last good version, i.e. finding the last false rather than finding the first truth.
As before, we assume that we have the
isBadVersion(num)API provided and we can use this to reduce the search space.Now how do we reduce the search space? Let's look into both cases:
When the API
isBadVersion(mid)returnsfalseThis means that the given
midis a good version. Since this could potentially be the last good version, we will need to consider it for future iterations.Hence
low = mid.
When the API
isBadVersion(mid)returnstrueThis means that the given
midwas a bad version. Since we are concerned with the false values, we will ignore this version.Hence
high = mid - 1.
Now we know how to update our pointers and reduce our search space. But there is one edge case we've missed out on.
Let's revisit our earlier test case. But this time our input will be
n = 5, bad = 5. Initially,low = 1,high = 5and we will iterate and reduce search space untillow != high.low = 1,high = 5andmid = 3.isBadVersion(3)results infalse. Hence,low = mid => 3.low = 3,high = 5andmid = 4.isBadVersion(4)results infalse. Hence,low = mid => 4.low = 4,high = 5andmid = 4.isBadVersion(5)results infalse. Hencelow = mid => 4.
But wait, we had already reached the same state earlier!
When we try to update the value of
lowtomidto find the last falsy value, we will always be stuck in an infinite loop when the search space is finally down to 2 values:[x, y]. Thexwill always be chosen as the midpoint in this case.To solve the infinite loop issue, we can update the calculation of mid as
low + (high - low + 1)/2. This gives theceilingvalue from the division rather than thefloor.The following image depicts the issue of the infinite loop where the element
x1is chosen as the mid over and over again when search space is down to [x1, x2]: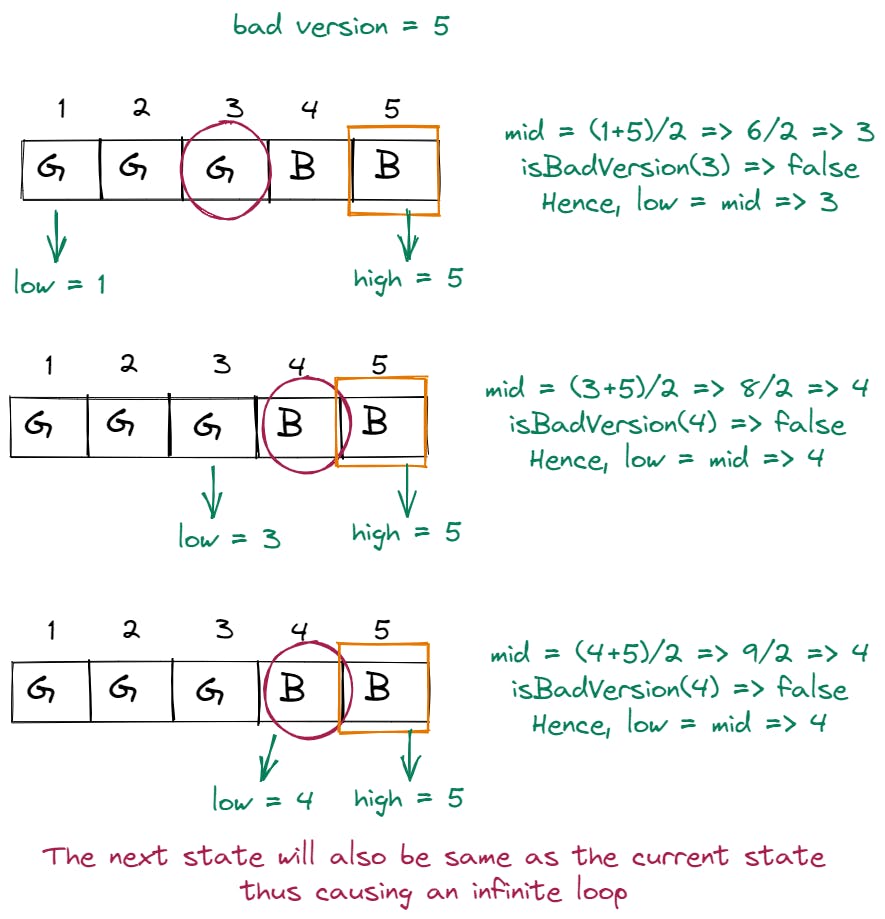
Below is the code for the above implementation where we find the last falsy and then use it to find the first bad version:
/* The isBadVersion API is defined in the parent class VersionControl. boolean isBadVersion(int version); */ public class Solution extends VersionControl { public int firstBadVersion(int n) { int low = 1, high = n; while(low < high) { // to avoid integer overflow int mid = low + (high - low + 1)/2; if(isBadVersion(mid)) { high = mid-1; } else { low = mid; } } // when there are no good versions, then return the low itself if(low == 1 && isBadVersion(low)) return low; return low+1; } }Time Complexity: O(log n) Space Complexity: O(1)
Low mid and High mid
In short, there are two cases:
When we want the last false or the high mid, then we find the value of
midas:mid = low + (high - low + 1)/2When we want the first truth or the low mid, then we update the value of
midas:mid = low + (high - low)/2
Example #3
We saw in the previous two examples the input was sorted. Now let's deal with unsorted input.
Let us solve the question to find the peak index in a mountain array.
The input array given will be of a length greater than 3.
Initially until a point, peak, increases and then decreases from there.
- An e.g. is
[0, 10, 5, 2]=> The input increases until peaks at index 1 (value 10) and then decreases.
- An e.g. is
Given the array, we need to find the index of the peak element.
The first step is to identify how we can form a predicate to move the pointers and reduce search space.
If you observe, the input can be split into two parts with one-half increasing
[0..peak]and the other decreasing[peak+1...n-1].Hence, we can form a relationship between the current element and the immediate element to its right.
We then have two cases:
The next element is greater than the current element
- This is the increasing portion of the input. The peak element would lie in this portion.
The next element is smaller than the current element
- The current element marks the end of the increasing portion and the current element could potentially be the peak element.
Hence, we can form a predicate such that we compare the current element
midwith the next elementmid+1.If
nums[mid] > nums[mid+1]: we move to the left side themidcould potentially be the peak index.Else
nums[mid] < nums[mid+1]: we move to the right side of the peak element.Hence our predicate is this:
nums[mid] > nums[mid+1].Let's consider the following test case:
[0, 10, 5, 2]. We will perform our algorithm until the pointerslowandhighremain unequal.low = 0,high = 3, andmid = 1.nums[mid] > nums[mid+1]=>10 > 5=> trueHence update
high = mid=>high = 1.
low = 0,high = 1andmid = 0.nums[mid] > nums[mid+1]=>0 > 10=> falseHence, update
low = mid + 1=>low = 1.
Finally,
low = high = 1, hence we will stop the algorithm and return the indexlow(orhigh) as the peak index.
Below is the code for the problem:
class Solution { public int peakIndexInMountainArray(int[] arr) { int n = arr.length; int low = 0, high = n-1; while(low < high) { int mid = low + (high - low)/2; // the peak could potentially be the mid element if(arr[mid] > arr[mid+1]) { high = mid; } // increasing portion of array else { low = mid + 1; } } return low; } }Time Complexity: O(log n) Space Complexity: O(1)
Example #4
Let us look at a final example to understand one of the main use cases of the modified binary search algorithm.
In this class of problems, the input will be unsorted. Along with the given constraints, we will have to use the input to obtain a sorted search space and then apply the modified algorithm.
The following problem from Interview Bit to allocate books is a good example. Let's use this to understand this class of problems.
Given an array of
Nbooks, and an arrayAwhereA[i]represents the number of pages in the booki, our task is to allocate these pages toB(given) students such that the maximum number of pages allocated to a student is minimum.We are also given a few constraints:
1 book can be allocated to only 1 student
- We cannot allocate say half the pages from the book
ito student 1 and the other half to student 2.
- We cannot allocate say half the pages from the book
Each student should be allocated at least 1 book
- If we have 4 students, then all 4 students must be allocated one book. We cannot say allocate all the available books to 1 student and allocate none to the remaining 3.
Book
ishould be allocated before the booki+1
Let us review this sample test case:
A = [12, 34, 67, 90], B = 2. We will have to allocate all these books to B students such that the maximum book allocated is the minimum.Some possible ways include:
student 1:
12, student 2:34, 67, 90- maximum pages allocated =
34 + 67 + 90 => 191
- maximum pages allocated =
student 1:
12, 34, student 2:67, 90- maximum pages allocated =
67 + 90 => 157
- maximum pages allocated =
student 1:
12, 34, 67, student 2:90- maximum pages allocated =
12 + 34 + 67 => 113
- maximum pages allocated =
Out of all the three possible ways for the test case,
113is the answer as the maximum number of pages allocated in this case is the least compared to 191 and 157.To solve this problem, we will first have to figure out the search space.
For the time being, let's forget about the constraint to allocate
Bstudents and focus on the maximum number of pages that can be allocated.The maximum number of pages allocated will be the least when we assign one book per student. In this case, the lowest maximum number of pages allocated will be the book which has the maximum number of pages defined as
max(A).The maximum number of pages that can be allocated will be the highest when we assign all the books to one student. In this case, the highest maximum number of pages allocated will be the sum of pages in all the books defined as
sum(A).
Our search space is reduced to
[max(A)...sum(A)]which is sorted- Specifically, in this sample test case
[90...203].
- Specifically, in this sample test case
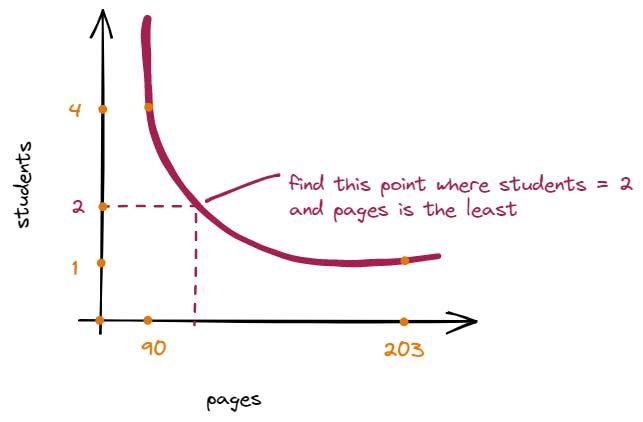
Now, in this search space, we will have to find the number of pages, say
x(such that it's the least) so that they can be distributed toBstudents.xshould be such that every student must be allocated pages less than or equal tox.If you notice, we have formed a mapping between the pages and student count.
Below is the graph that clearly describes this relationship
To find the least maximum pages to allocate to
Bstudents will use binary search on the search space.For every
lowandhighvalue, we will set a barrier of the maximum number of pages that can be allocated per student defined asmid.We will then use this barrier
midto see how many students can be allocated the books such that the sum of pages per student is less than or equal tomid.If this barrier allows us to allocate pages to more than
Bstudents, then we must increase the value of this barrier to try and accommodate more books (leading to more pages) for a single student.If the barrier allows us to allocate pages to less than or equal to
Bstudents, then we must try to decrease the value of this barrier to accommodate fewer books (leading to fewer pages) for a single student.
Hence we can define a predicate
canAllocate(barrier, B).canAllocate(barrier, B) == true, if the number of students allocated books is less than or equal toB.canAllocate(barrier, B) == false, if the number of students allocated books is more thanB.
if canAllocate(barrier, B):
decrease the barrier
this can be a potential least of the maximum
else:
increase the barrier to accommodate more books per student
More Formally, replacing
barrierwithmid:if canAllocate(mid, B): high = mid else: low = mid + 1The below images show the process of using binary search to solve the sample test case:
A = [12, 34, 67, 90]andB = 2
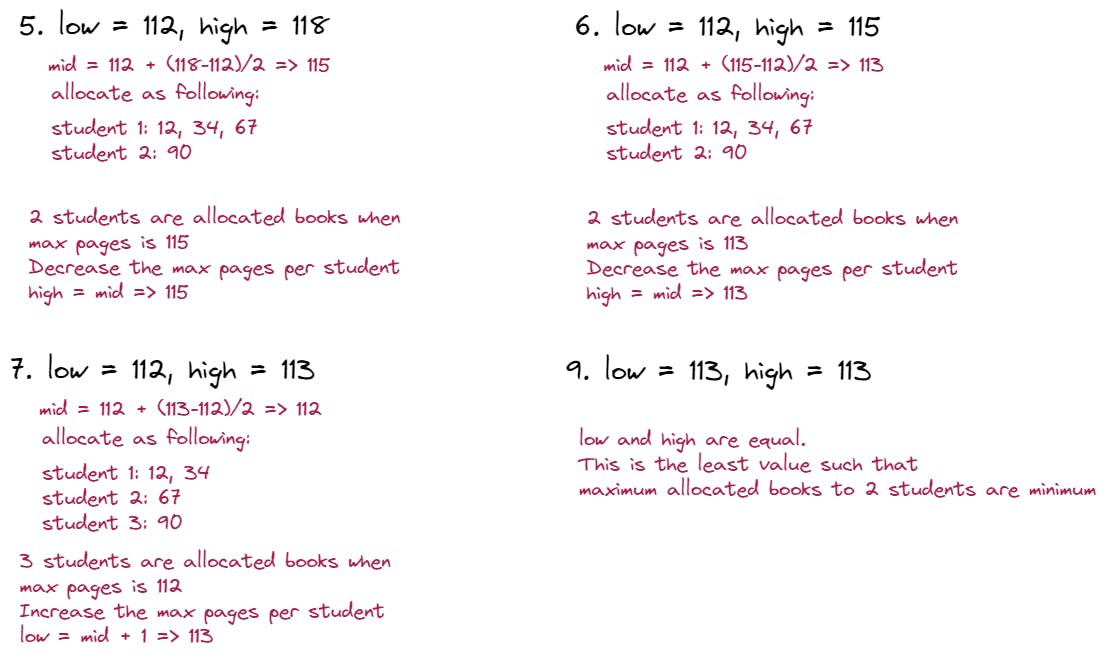
Hence, using binary search we will try to find the maximum pages per student that can be allocated using
midbetween intervalslowandhigh.Depending on whether or not it is possible to allocate all the books to the required number of students
B, we will keep reducing the search space untillow != high.- This should be done such that every student has no more than the
midnumber of pages allocated.
- This should be done such that every student has no more than the
Below is the code for the problem
public class Solution { public int books(ArrayList<Integer> A, int B) { // It is impossible to allocate books to B students if // B > n (number of books) if(A.size() < B) return -1; return binarySearch(A, B); } private int binarySearch(ArrayList<Integer> A, int B) { // the least maximum value is the max number of pages of all books // the highest maximum value is the total number of pages in all books int low = A.get(0), high = 0; for(int pages: A) { low = Math.max(pages, low); high += pages; } while(low < high) { int mid = low + (high - low)/2; if(canAllocate(mid, A, B)) { high = mid; } else { low = mid + 1; } } return low; } private boolean canAllocate(int pages, ArrayList<Integer> books, int students) { int total = 0, count = 1; // check how many students can be distributed books such that total pages <= pages for(int page: books) { if(total + page > pages) { count++; total = 0; } total += page; } return count <= students; } }Time Complexity: O(n * log n) - O(n) to try and allocate pages per student and get the count of students required - O(log n) to binary search in the search space [low,.. high]
Conclusion
Most of the problems with the binary search are not as straightforward as searching for a target in the search space. They would be similar to the problem solved in example#4.
Mostly you'll find the pattern of finding the least(first or highest of something in the search space. Similar to a greedy optimization problem where there is a defined ordering and constraints used to form a sorted search space.
This is the reason why there's a need for the modified algorithm which uses monotonic predicate functions.
The only issue with these sets of problems is identifying that they are binary search problems! This only comes with practice.
Hence, at the end of this article, I will be mentioning a Google doc that will contain a list of similar binary search problems that can help you to gain an in-depth understanding of identification, creation of search space and implementation of binary search.
Summary
Predicate is a function that returns binary values: either true or false.
Binary search can be used in problems where a predicate can be applied to any search space with a defined ordering and it results in either
T*F*orF*T*pattern.Usually in problems defined by endpoints
low,highand themid, we can either search for:low mid (first truth) defined by
mid = low + (high - low)/2high mid (last false) defined by
mid = low + (high - low + 1)/2
Resources
Thank you for reading this article on Binary Search. If you liked what I wrote and found this informative, please like, share and comment!
Special thanks and sincere gratitude to Deipayan Dash whose sessions helped to gain an in-depth understanding of solving problems with binary search on unsorted input using the predicate framework.